Pomysł budowy plotera laserowego przyszedł mi do głowy po zakupie lasera który miał być umieszczony we frezarce cnc 3018. Na znanym chińskim portalu zakupiłem za 137 $ przystosowany do montażu w mojej frezarce cnc 3018 Pro Max laser diodowy o mocy 15W. Hałas jaki generuje frezarka która pracuje na śrubach, a nie na paskach, mały bo o rozmiarach 30 x 18 cm i na dodatek ruchomy stół roboczy utrudnia pracę, bo każdy z grawerowanych czy ciętych materiałów musiał by być mniejszy od rozmiaru stołu oraz bardzo dobrze do niego przymocowany.
Tak więc mając moduł lasera zacząłem rozglądać się za projektem plotera tzw. stawianego, czyli takiego, który będzie można postawić nawet na dużo większym obrabianym materiale.
Elementy potrzebne do uruchomienia automatyki:
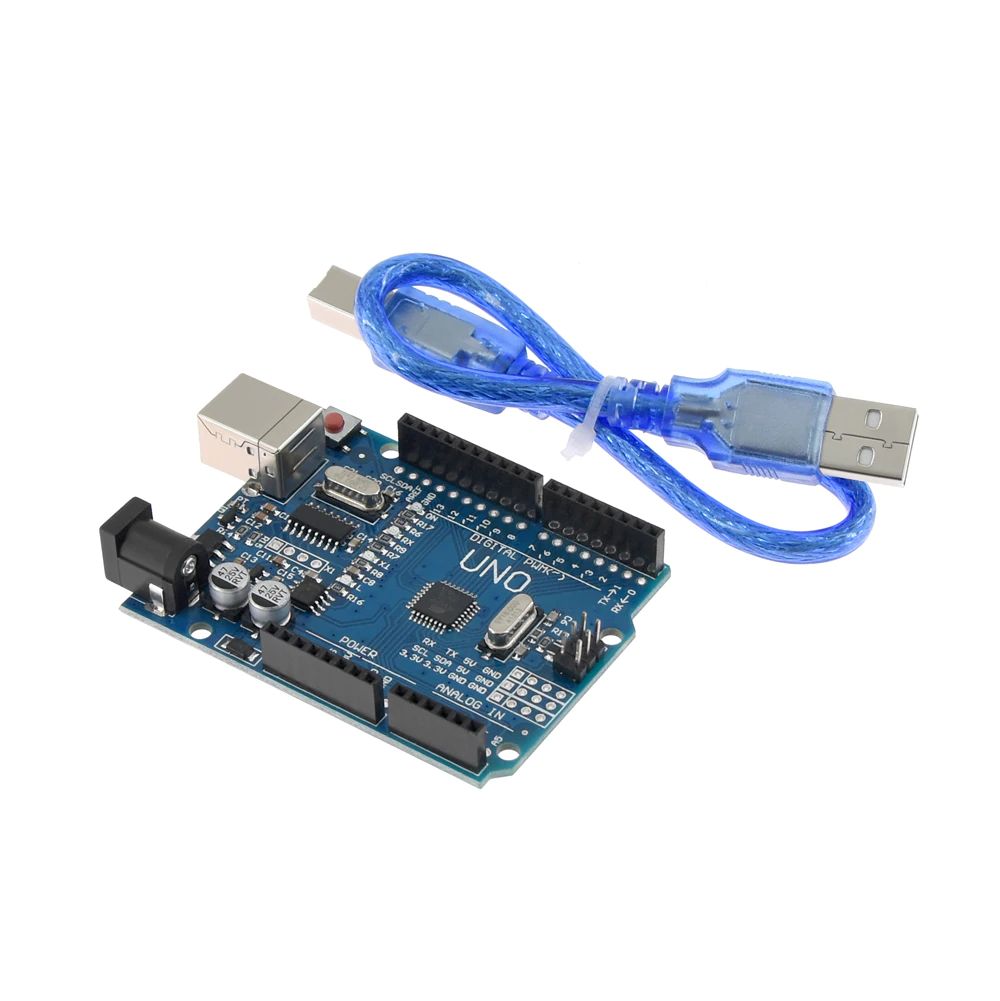
- za 10 $ na AliExpresie zakupiłem płytkę Arduino Uno R3 z płytką rozszerzeń CNC Shield V3.0 oraz czterema sterownikami silników krokowych A4988;
- za 27 $ zestaw pięciu silników krokowych 17HS4401S wraz z przewodami połączeniowymi (potrzebujemy 3 szt. jeden dla osi X oraz 2 szt. dla osi Y);
- za 28,90 zł na naszym rodzimym alledrogo dokupiłem zasilacz 230/12V 5A;
- za 2,50 zł zestaw 20 zworek 2,54mm (mogą być zworki ze starych twardych dysków), łącznie potrzebujemy ich 11;
- dwa wyłączniki: jeden 230V, a drugi 12V do wyłączenia zasilania lasera (tak, myślę o tym, by przy okazji był to ploter rysujący);
- przewód zasilający (może być z odzysku);
- przewody 4×0,25 lub 4×0,35 do przedłużania przewodów od silników krokowych;
- oraz trochę przewodów do połączenia zasilania;
- całość zapakujemy w obudowę z wentylatorem 4010 zasilanym 5V z cnc shield’u lub 12V bezpośrednio z zasilacza.
Zgrywamy i instalujemy program do programowania płytek.
Ściągamy nakładkę Grbl, rozpakowujemy ją i przenosimy do utworzonego nam przez instalator programu Arduino katalogu: C://Pliki_programów/Arduino/libraries.
Przy pomocy kabla USB (powinien być w komplecie) podłączamy naszą płytkę Arduino Uno pod komputer. Na razie nie potrzebujemy do tego oddzielnego zasilania bo zasilamy płytkę poprzez USB.
Uruchamiamy program Arduino. Z menu wybieramy na początek: narzędzia/płytka i wybieramy jaki rodzaj płyty Arduino posiadamy. Tutaj będzie Arduino Uno. Następnie wybieramy: narzędzia/port i ustawiamy port pod który mamy podłączoną płytkę. Następnie z menu wybieramy: pliki/przykłady/eeprom/eeprom_clear. Płytkę mamy przygotowaną do wgrania GRBL’u. Z menu wybieramy naszą nowo wgraną bibliotekę: pliki/przykłady/grbl/grblUpload i ją uruchamiamy. System zacznie nam się wgrywać.
Po wgraniu GRBL’a płytka jest gotowa do pracy
Odłączamy płytkę od kabla USB.
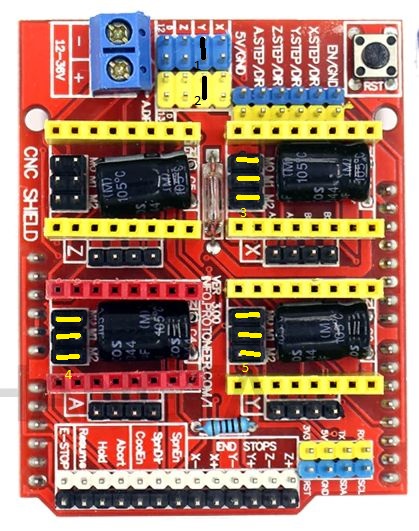
Przygotowujemy CNC Shield.
W pierwszej kolejności duplikujemy silniki tak, aby silnik podpięty pod gniazdo A był widoczny przez system jako nasz drugi Y. Zakładamy zworki w miejscach 1 i 2.
Następnie zwiększamy ilość impulsów na obrót zakładając po trzy zworki w miejscach 3, 4 i 5.
Znając krok naszego silnika jako 1,8° (w tym przypadku jest to silnik 17HS4401S) trzy zworki na silnik zapewnią nam przy płytce CNC Shield V3.0 podział 1/16 kroku, a koło zębate które zastosujemy to GT2 z 16 zębami. Uzyskamy w ten sposób 100 kroków na 1mm i teoretyczną precyzję 10 μm.
Do podstawek X, Y i A montujemy sterowniki A4988 tak aby pin „enable” wszedł w gniazdo „EN” na płytce, uważając na ładunki statyczne (najlepiej się uziemić).

CNC Shield z zamontowanymi sterownikami silników krokowych łączymy z naszą płytką Arduino Uno.
Trzeba pamiętać o jednym, jeżeli nie będziemy wykorzystywać któregoś z portów, nie montujemy w nim sterownika. Sterowniki są na tyle czułe, że jeżeli nie będą miały obciążenia w postaci sinika to mogą się spalić.
Montujemy elektronikę do końca. Podłączamy silniki pod piny przy portach X, Y i A.
Poprzez wyłącznik montujemy także zasilacz 230/12V.
Podłączamy laser.

Do lasera dostałem dwa komplety przewodów, jeden zakończony po obu stronach wtykiem JST800139 (3 piny), a drugi z jednej strony z wtykiem JST800139 (3 piny), a z drugiej strony z dwoma wtykami JST800055 (po 2 piny). Do mojego projektu wykorzystałem ten drugi.
Wtyk z 3 pinami podłączamy pod laser, z drugiej strony wtyk z przewodami od „PWM” i „GND” podłączamy pod „Z+” i „GND” na miejscu dla wyłączników krańcowych na płytce rozszerzeń, a wtyk od „+12V” i „GND” podłączamy pod wyjście zasilacza 12V (oczywiście poprzez wyłącznik).
Do naszych testów wykorzystamy program Laser GRBL.
Ściągamy oraz instalujemy program, podłączamy poprzez kabel USB naszą zmontowaną już elektronikę i załączamy zasilanie.
Wybieramy nasz port pod który podłączyliśmy elektronikę, ustawiamy prędkość z jaką program ma się komunikować z płytką na 115200 i klikamy na ikonkę Connect.
Program powinien się teraz już komunikować z naszym Arduino Uno.
Przy pomocy strzałek możemy teraz poruszać naszymi silnikami oraz załączać i wyłączać laser z poziomu programu.
